
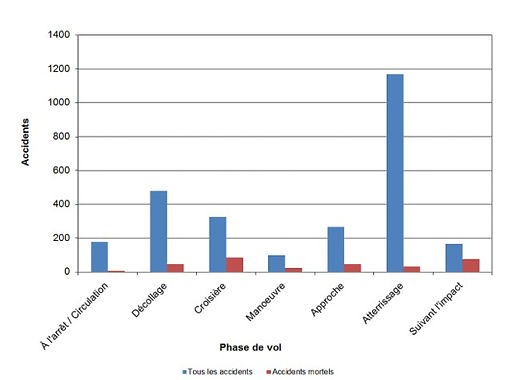
La préoccupation majeure dans l'aviation civile est la sécurité aérienne. L'approche et l'atterrissage étant les phases du vol les plus complexes et critiques, l'importance de les effectuer avec le maximum de dextérité domine. Une étude du bureau de la sécurité des transports du Canada effectuée de 2002 à 2011 révèle les taux d'accident en fonction des phases de vol, ces chiffres nous révèlent que l'atterrissage est en effet le moment le plus critique du vol :
Les compagnies aériennes et les avionneurs doivent résoudre le problème de la mauvaise visibilité pour les approches : à cause de mauvaises conditions météorologiques, des avions devaient souvent se dérouter vers d'autres aéroports ce qui n'était avantageux ni pour les compagnies, ni pour les passagers. De plus certains appareils n'avaient pas l'autonomie suffisante pour se dérouter vers un autre aérodrome ce qui pouvait parfois entraîner des situations très préoccupantes. Dans une interview de 1969, le vice président de la compagnie Air Inter, Robert Vergnaud, met en avant l'importance de la sécurité aérienne et de la ponctualité du transport :
Ainsi, nous allons montrer deux innovations, deux systèmes fonctionnant conjointement qui ont permis de sécuriser les approches et les atterrissages.
Le système d'approche ILS et son fonctionnement :
Les premiers essais d'approches aux instruments ont été effectués aux Etats-Unis dès 1929. On appelle ces approches sans visibilité ainsi car les pilotes utilisent les instruments de leur cockpit pour pouvoir naviguer. Le 26 Janvier 1938, un Boeing 247D de la Pennsylvania Central Airlines fait route de Washington DC vers Pittsburgh. Pris dans une tempête de neige, il est le premier avion commercial à effectuer une approche ILS (Pour : Instrument Landing System).
L’ILS, est un système qui utilise la radio-navigation pour permettre d’effectuer des approches dans des conditions de faible visibilité, principalement à cause du brouillard, d'un plafond bas (hauteur de la couche nuageuse) ou d'une tempête. L’ILS présente un système au sol qui fournit un guidage latéral et horizontal de précision à l’avion en approche. Chaque piste possède sa propre fréquence ILS et sa hauteur de décision minimum. La hauteur de décision est la hauteur minimum par rapport au sol à laquelle les pilotes doivent avoir un visuel sur la piste. Atteignant cette hauteur, ils décident de continuer ou non l’approche, auquel cas une remise des gaz s’impose. Le système ILS d’un avion est la plupart du temps couplé au pilote automatique, l’approche peut donc être effectuée automatiquement (avec les vérifications et réglages du pilote automatique nécessaires ).
L’approche ILS est rendue possible grâce à trois installations au sol :
-
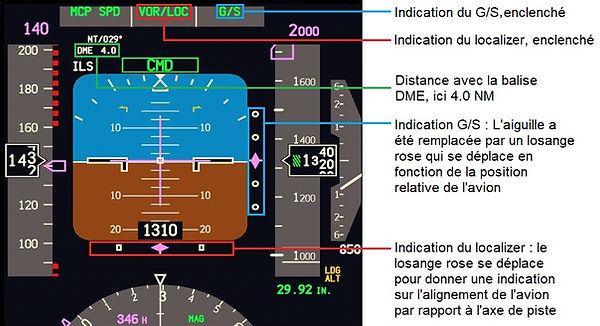
Le glide path (également glide slope, G/S ou G/P), fournit une indication de position de l’avion par rapport au plan de descente moyen propre à la piste empruntée (allant généralement de 3° à 5° de pente)
-
Le localizer, qui fournit une indication de l’écart de l’avion par rapport à l’axe de la piste.
-
La balise DME (Distance Measurement Equipment), donne une indication de la distance de l’avion par rapport au seuil de piste.
Notons que le DME est très souvent implanté directement sur le G/S, ce qui est pratique pour les pilotes qui peuvent ainsi connaître leur distance exacte avec le seuil de piste. Le glidepath est généralement installé à 1000ft (ft = feet, pieds en anglais, 1ft = 0.3m) de l’endroit du toucher des roues à l’atterrissage, le localizer quant à lui est situé tout au bout de la piste emprunté. Le système ILS comprend une connexion à une radiobalise sur des fréquences de la gamme VHF (Very High Frequency), les pilotes ont besoin de pouvoir établir une communication avec la balise propre au seuil de la piste empruntée. Le localizer, le glidepath et le DME utilisent des fréquences différentes mais d’un point de vue pratique, les pilotes n'en rentrent qu'une seule sur la planche radio, généralement celle du LOC, auquel sont couplées les autres fréquences du G/S et du DME. La portée certifiée est de 15 à 20 NM (NM = Nautical Miles ; 1 NM = 1,852 Km) pour le localizer (30 à 50 en pratique) ; légèrement moins pour le glide path. Le DME d'un ILS peut être reçu jusqu'à 50 voire 100 NM.
Le G/S émet dans la gamme des 330 MHz, le LOC quant à lui émet entre 108,10 MHz et 111,95 MHz avec la première décimale toujours impaire (ex : 109,55 ; 110,10 ; 108,75 …). Il y a donc 40 canaux d’ILS différent, cela ne pose pas de problème puisque qu’on ne trouvera jamais plus de 40 aéroports avec un système ILS dans un rayon de 100 NM.
Le Localizer utilise une différence des taux de modulation (Difference in Depth Modulation ou DDM) pour situer l’avion sur son plan horizontal.
Considérons sur le schéma ci-dessus l’avion en approche de la piste, aligné sur l'axe de la piste. Le localizer émet simultanément deux fréquences de 150Hz et 90Hz. Les taux de modulation dépendent de la direction d'émission, de telle sorte que soient délimitées de part et d'autre de l'axe de piste deux zones, droite (150Hz) et gauche (90Hz). Une fois capté par les antennes VHF de l’avion, le signal est démodulé et redirigé vers deux filtres passe bande de 90 Hz et 150 Hz. Ces tensions alternatives 90 et 150 obtenues sont redressées et transformées en tensions continues V90 et V150.
On effectue une différence des deux tensions, qui est proportionnelle à la différence du taux de modulation DDM. On exprime souvent cette différence de tension en pourcentage, un alignement parfait sur l’axe de piste équivaut à 0%, soit V90 = V150. On estime un écart d’un mètre de l’axe de piste à une différence d’environ 0,145%. La tension obtenue permet de faire fonctionner les indications sur les instruments dans le cockpit pour pratiquer les approches ILS.
Le glide slope fonctionne sur le même principe de différence des taux de modulations. L'émission de deux fréquences de 90 Hz et 150 Hz permettent d'établir un plan de descente aux avions en approche :
Les instruments :
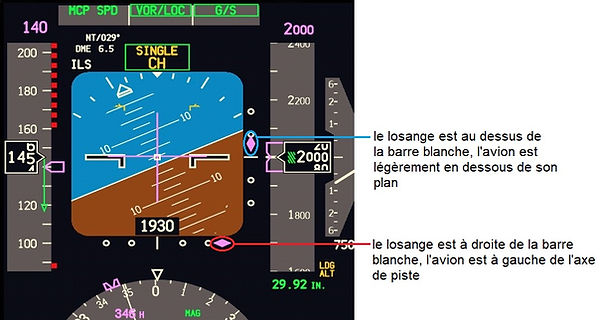
L'instrument utilisé dans les cockpit classiques pour connaître l'axe et le plan de l'avion en approche est le CDI (Course Deviation Indicator). Des aiguilles correspondant au glide slope et au localizer se déplacent pour donner les indications sur la position de l'avion par rapport à l'axe de piste et son plan de descente :
Différents cas de figure :
Sur les cockpits modernes, ces indications sont recensées sur les PFD (Primary Flight Display) des avions de ligne. Nous montrerons ici le PFD d'un boeing 737NG (737 next generation, ce sont les 737-600,700,800 et 900 ; mise en service fin des années 1990) :
L’atterrissage automatique ou autoland :
Nous pouvons être fier d'apprendre que le premier atterrissage automatique a été effectué par un avion français. En effet la Caravelle, de l’avionneur Sud-Aviation (ancêtre d'Airbus, mais également inventeur du Concorde) a été un avion révolutionnaire. Le 9 Janvier 1969, deux Caravelle d'Air Inter (qui fusionne plus tard avec Air France) effectuent les premiers atterrissages en automatique. Le vice-président d'Air Inter de l'époque étant Robert Vergniaud.
L’autoland, qui est un système d'atterrissage automatique, vient se coupler à l’ILS. Il est rendu possible grâce à une nouvelle catégorie du système d’approche aux instruments : l’ILS de catégorie III ou CAT III (les ILS CAT I et II étant toujours utilisés pour des approches ILS sans autoland). Il faut que l’avion ait les systèmes requis pour effectuer une telle approche et donc être certifié CAT III. Il faut également les installations au sol nécessaires : souvent des balises et des lumières supplémentaires avant la piste pour permettre une meilleure visibilité de celle-ci par mauvais temps.
Panneau à l’entrée du point d’attente “Charlie” à l’aéroport Nantes Atlantique de la piste 03, indiquant la possibilité d’une utilisation de l’ILS de catégorie III.

L’autoland est généralement utilisé lorsque la visibilité est inférieure à 600 mètres et/ou dans de mauvaises conditions météo. Lors de certaines approches par très fort brouillard, les pilotes ne voient parfois le seuil de piste qu'a 50ft et n'auraient pas assez de réactivité pour se poser manuellement, d'où la nécessité du système autoland. Il existe différents types d'ILS CAT III : les ILS CATIIIa, CATIIIb et CATIIIc. Elle diffèrent surtout par leur hauteur de décision. Par exemple la CATIIIc, encore très peu répandue, permet aux pilotes de se poser sans aucune visibilité.
L'altimètre qui utilise la pression environnante pour donner l'altitude de l'avion aux pilotes n'est pas assez précis pour donner avec exactitude la distance de la machine avec le sol. Il existe pour cela le radio-altimètre, un système qui fonctionne comme un radar pour donner l'altitude de l'avion par rapport au sol. Des ondes sont envoyées de l'avion vers le sol, rebondissent sur le terrain et son renvoyées vers l'aéronef, on peut ainsi connaître avec une grande précision l'altitude par rapport au sol.
Nous parlerons du fonctionnement des autoland sur les Boeing, toutefois les systèmes sur les avions d'autres avionneurs (Principalement Airbus, Bombardier ou Embraer) sont fondamentalement les mêmes, l'interface est surtout différente. Il y a généralement deux ou trois systèmes de pilotes automatiques dans les avions, ils se communiquent les informations sur le vol, se confirment ou se contredisent afin d’obtenir les sources nécessaires pour un pilotage le plus exact possible. Dans le cas d'un autoland, tous les pilotes automatiques ont besoin d'être enclenchés du fait de la complexité de l'appareillage de l'autoland.
Le système du pilote automatique en charge de l'autoland se divise en plusieurs parties. Un système nommé FLARE (de l'anglais : arrondi), permet à l'avion de faire son arrondi tout seul. L'arrondi est une manœuvre à cabrer, effectuée avant le contact des roues avec la piste, indispensable à chaque atterrissage pour que le toucher se fasse en douceur. Les pilotes s'assurent à 500ft sol que le FLARE est armé, le cas contraire, l'autoland ne pourra pas s'effectuer. Le FLARE s'active à des hauteurs différentes en fonction des avions (50ft sol pour un 737).
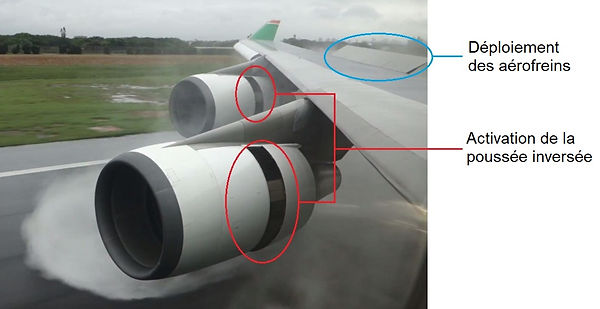
La puissance des moteurs est géré par un système du pilote automatique, les auto-manettes (ou auto throttle en anglais) durant tout le vol et aussi durant l'autoland. En effet, juste après l'activation du FLARE, l'auto throttle réduit les gaz au ralenti, l'avion se pose tout en douceur. Posés, les pilotes désengagent le pilote automatique puis contrôlent la trajectoire de l'avion sur la piste, manuellement. Comme pour tout atterrissage Ils peuvent engager la poussée inversée, (ou reverse thrust). La partie arrière du réacteur se déplace pour rediriger la poussée vers l'avant du moteur, cela permet à l'avion de freiner efficacement. A l'atterrissage, les aérofreins se déploient, ce sont des dispositifs qui permettent de casser la portance de l'aile et en sorte de plaquer l'appareil au sol pour freiner plus efficacement.
Notons qu'il existe sur tous les avions de ligne un système de freinage automatique, les autobrakes, qui offrent des intensités de freinages différentes en fonction des besoins (en fonction de la longueur des pistes par exemple). Sur certains modèles, existe un autre système nommé le ROLLOUT. Une fois posé, l'avion garde par lui-même sa trajectoire au centre de la piste. Les pilotes actionnent les reverses et déploient les aérofreins, cependant ils désengagent le pilote automatique plus tard, avant de dégager la piste.
Reprenons le PFD du Boeing 737NG, sur le schéma ci-dessous figure l'interface utilisée pour l'autoland.
Les avions de nos jours utilisent fondamentalement les mêmes systèmes d’ILS et d’autoland qui étaient présents dès les années 1970. Les avionneurs ont néanmoins procédé à des améliorations des systèmes au niveau de leur précision ou de leur interface avec l’arrivée des écrans LCD dans le cockpit. La motivation majeure de toutes ces améliorations étant la sécurité du vol.
Les approches et les atterrissages automatiques

Balise d'un glide path

Balise d'un localizer










aligné sur l'axe, V90 = V50
à droite de l'axe,
V90 > V150
à gauche de l'axe,
V90 < V150
au-dessus du plan,
V90 < V150
en-dessous du plan,
V90 > V150
alignement sur l'axe et plan de descente parfait
Sur le schéma ci-dessous, l'avion fait son dernier virage, à droite, pour s'aligner sur la piste. Le localizer et le G/S sont enclenchés, l'appareil effectue son virage tout seul à droite et vient juste après chercher automatiquement son plan de descente.

Atterrissage d'un Boeing 747-400, on remarque la puissance de la poussée inversée par la déflexion de la pluie
Au niveau du cockpit :

Un problème majeur doit être résolu :
Résumons les actions cockpit, les pilotes exécutent une approche ILS de la façon suivante :
-Ils rentrent la fréquence ILS de la piste utilisée et son cap (qu'on appelle également course) sur la planche du pilote automatique
-Les pilotes s'assurent d'avoir capté la fréquence en voyant apparaître l'indication du DME
-Avant le dernier virage, le losange rose du LOC apparaît, les pilotes enclenchent sur la planche du pilote automatique le bouton qui permet de capturer le localizer (bouton "VOR LOC" sur Boeing)
-L'appareil est maintenant aligné sur la piste, l'approche s'effectue à une altitude située légèrement sous le plan de descente du G/S afin de pouvoir l'intercepter :
-L'avion s'approche de la capture du plan de descente, le losange rose du G/S est encore au-dessus de la barre blanche et commence à descendre. Les pilotes engagent sur la planche du pilote automatique la capture du G/S (bouton "APP" sur Boeing). Le G/S est capturé.
-L'aéronef est en approche, en automatique et va conserver le meilleur plan de descente et le meilleur alignement avec la piste, les pilotes s'assurent que tous les systèmes fonctionnent correctement.
Déroulement d'une approche ILS
Vidéo de l'INA de 1969 présentant l'exploit du premier "atterrissage tout temps"


L'horizon artificiel montre que l'avion est en virage à droite
